 |
| July 28, 2015 | Volume 11 Issue 28 |
Designfax weekly eMagazine

Archives
Partners
Manufacturing Center
Product Spotlight
Modern Applications News
Metalworking Ideas For
Today's Job Shops
Tooling and Production
Strategies for large
metalworking plants
Laser-sintered robotic hand is new kind of plastic gripper
Innovative lightweight robotic hand adopted to improve existing linear handling system.

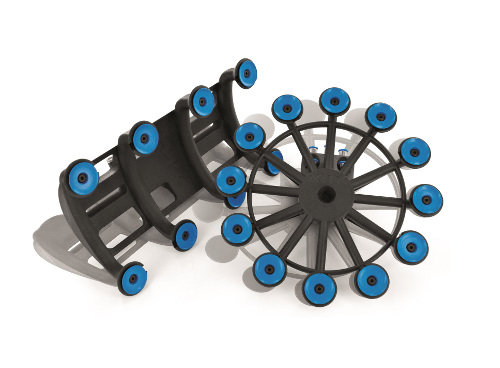
Lightweight and stable: This new kind of robotic hand, developed by ASS Maschinenbau GmbH and made using additive manufacturing, has been in daily use at Theo Hillers GmbH since early 2014. (Image courtesy: ASS Maschinenbau GmbH)
Extensive automation is an important factor in achieving success in the manufacturing sector. But what if a company requires a small series of custom-made components for its own production process?
This was the challenge faced by ASS Maschinenbau GmbH, a leader in the design and manufacture of robot hands, robot hand components, and automation systems, (Overath, Germany) and its customer, Theo Hillers GmbH (Kall, Germany). One of the products that Theo Hillers manufactures is a sieve. It is produced using an injection-molding process for companies in the pharmaceutical sector. Robotic hands remove the finished components; they are specialized robotic hands, the fabrication of which is only possible through additive manufacturing. Production was trusted to the EOS plastic laser-sintering machine operated by ASS Maschinenbau.
Challenge
Theo Hillers GmbH was searching for a solution for the handling of sieves and their sprues (the waste piece on a casting left by the hole through which the mold was filled). The solution was to be docked on a sprue-removal device, often known as a "sprue picker." For a number of reasons, standardized automation technology had reached its limits. The problems included the continued utilization of the existing sprue picker, the number of small mold cavities in the tightest of spaces, increased quality requirements, limited space, and a maximum weight of the robotic hand of about 500 g. In addition, there was the need to reduce overall complexity. A new process was needed. ASS Maschinenbau GmbH took on the task.
With the previous solution, the sprue picker extracted the sprue using a two-axle linear handling unit with an additional swivel axis, dropping the filter screens as free-drop parts on a conveyor belt. In the new manufacturing process, it was possible to optimize the reliability of the process and to minimize wastage. This is because the filter screen was no longer dropped onto the conveyor belt: the clean removal and setting down of the part on the belt were fundamental aims of the project.
There were two options when it came to designing a solution: either develop a new linear handling unit with an aluminum robotic hand for part removal, or design a solution based on the retention of the existing handling unit. Cost factors dictated that the latter was the preferred approach. The step toward a solution based on a new type of robotic hand required pioneering spirit and the courage of Theo Hillers GmbH: Unlike with grippers made from aluminum-based modular systems, when it came to the lightweight polyamide construction of a robotic hand there was little practical experience to fall back on. This contrasts with other areas that do already utilize components made from the material.
Solution
Known at ASS Maschinenbau as PA-Forming, additive manufacturing offered the best solution because it allowed for the continued use of the customer's existing system. The constructors were given maximum freedom of design -- ideal for the construction of the robotic hand, with its complex geometries. As the products are extracted over a vacuum using suction, the engineers carried out corresponding tests prior to the actual construction of the gripper: The robotic hand needed to apply suction to eight or 12 cavities (depending on the application) over the generated vacuum. It also had to be able to stop. These tests revealed that the 12-cavity robotic hand required four air circuits for every three articles, while the eight-cavity hand needed four air circuits for every two.
On the basis of the compiled results, air ducts were integrated in the CAD data. The internal air ducts offer the advantage that no additional weight is incurred for the air hoses and that the robotic hand is far tidier and thereby less complex; what's more, this means that maintenance times are reduced.
To save further weight, the connections for the vacuum suction are also constructed directly in the robotic hands instead of, as previously, using adapters made of brass. This also makes changing the suckers (that pick up parts) a simple task. ASS Maschinenbau combined the numbers of cavities, the air ducts, the connectors to the linear handling unit, and the valves such that the limits of weight and space were adhered to. They simultaneously ensured that the robotic hand was both stable and would remain free from fractures due to material fatigue.
Following the conclusion of the comprehensive planning phase, production took place in a single night in early 2014 using additive manufacturing. The EOSINT P 390 system from manufacturer EOS was used. Once the CAD data had been transferred, the machine used its laser to construct the component, layer by layer, from plastic powder. Following the extraction and cleaning of excess polyamide, the vacuum suckers, connections for the air supply, the grip jaws, and the necessary connection components were all fitted. The completed lightweight robotic hand was ready for use.
The vacuum suckers of the polyamide robotic hand place the filter sieves gently and securely on a conveyor belt. [Image courtesy: ASS Maschinenbau GmbH]
Results
For the first application, a lightweight robotic hand was produced from polyamide in the form of a star. The robotic hand has 12 vacuum suckers and a grip jaw. The suckers are there to ensure that the parts that were previously dropped down are now placed cleanly on the conveyor belt, while the grip jaws recover the sprue from the sieve. The air ducts for the vacuum suction and the grip jaws are internally integrated within the robotic hand, as is the adapter for the suction. With a diameter of almost 250 mm and a constructed height of approximately 110 mm, the robotic hand, made from polyamide, weighs less than 400 g and, therefore, could be easily expanded to include the grip jaws for the sprue.
"Immediately following the deployment of the additively manufactured robotic hand, the errors in the sieve that arose from the way in which it was dropped were eliminated," says Tobias Klinkhammer, Manager of Injection-Molding Production at Theo Hillers GmbH. "In this case, employing the additive solution, instead of the conventional systems from aluminum profiles, has fulfilled both our expectations in terms of handling and our fundamental aim, which was the reduction of wastage."
The innovative robotic hands meet the stringent basic conditions relating to dimensions and weight. Production and commissioning took place smoothly and quickly for ASS Maschinenbau and its customer, Theo Hillers GmbH. With the innovatively produced, extremely light, and compact robotic hands, the pharmaceutical supplier was able to increase its process reliability and thereby more than compensate for the slightly higher costs of production. The new gripper system and its associated manufacturing process have met all of its targets, playing an important role in maintaining the company's high level of competitiveness.
Video: ASS Maschinenbau GmbH shows off numerous innovations for its modular robot hand systems.
Source: EOS e-Manufacturing Solutions
Published July 2015
Rate this article
View our terms of use and privacy policy